 Ученым разных специальностей из Гарвардского университета совместно с институтом биоинженерных исследований в США после 12 лет исследований впервые удалось осуществить полет робота насекомого. Так называемая пчела-робот может быть полезна для опыления технических культур, для поиска и оказания помощи при разведке и спасении при катастрофах, а также и в военных конфликтах.
Ученым разных специальностей из Гарвардского университета совместно с институтом биоинженерных исследований в США после 12 лет исследований впервые удалось осуществить полет робота насекомого. Так называемая пчела-робот может быть полезна для опыления технических культур, для поиска и оказания помощи при разведке и спасении при катастрофах, а также и в военных конфликтах.
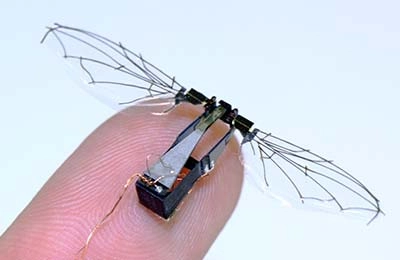
При проекте принималось во внимание биология мух. Величиной около 10 мм, весом 80 мг робот подвешен на тонком питающем кабеле и снабжен маленьким микродвигателем. Крылья имеют размах 3 см и колеблются с частотой около 120 раз в секунду. Они приводятся в движение пьезоэлектрическим приводным элементом: керамическая полоска расширяется и сокращается, когда к ней прикладывается электрическое поле. Робот управляется системой управления. Каждое крыло колеблется независимо друг от друга.
При этом коллектив в настоящее время занят подключением микробатареи, чтобы робот больше не зависел от питающего кабеля. Кроме того они стремятся создать своего рода головной мозг. Он будет управлять движением пчелы-робота и будет способен распознавать наблюдаемые объекты, для того чтобы со временем робот мог находить цветы. Равно как этот робот в таком случае сможет устанавливать по требованию ближайшего научного сотрудника и сообщать ему о возможном месте нахождения пчелиных роев. В действительности практический микроробот может появиться не скоро, возможно, это вопрос не одного десятилетия.
DBJ № 7/13
Пер. с немецк. В. Ефимов
- ВКонтакте
- РћРТвЂВВВВВВВВнокласснРСвЂВВВВВВВВРєРСвЂВВВВВВВВ

Имею и воск, и медовуху…
дек 5, 2014
Гаранты чистопородности при репродукции …
апр 18, 2015
Регулирование температуры в пчелиной сем…
сен 22, 2014
Как мы боролись летом против варроатоза …
сен 23, 2015
Твердый мед
нояб 26, 2016
Эффективность разных способов подсадки м…
дек 15, 2017
Пчелы и сад
март 18, 2015
Ловля роев, размножение семей и замена м…
июль 18, 2014
Загадки медоносных растений…
дек 2, 2015
Адъютант его превосходительства…
фев 5, 2019
Медосбор с рапса
апр 10, 2023
Превращения щавелевой кислоты при нагрев…
авг 26, 2014
Помогите, грабят!
мая 17, 2014
Второе сердце мужчины и продукты пчел…
сен 19, 2014
Воздействие патогенов культуры огурца на…
дек 2, 2016









 Адрес редакции журнала "Пчеловодство":
Адрес редакции журнала "Пчеловодство":



