

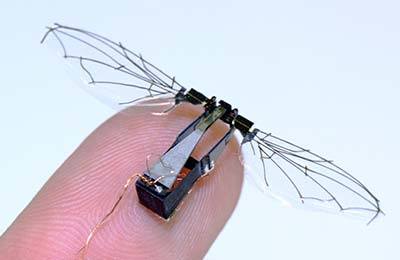
 Ученым разных специальностей из Гарвардского университета совместно с институтом биоинженерных исследований в США после 12 лет исследований впервые удалось осуществить полет робота насекомого. Так называемая пчела-робот может быть полезна для опыления технических культур, для поиска и оказания помощи при разведке и спасении при катастрофах, а также и в военных конфликтах.
Ученым разных специальностей из Гарвардского университета совместно с институтом биоинженерных исследований в США после 12 лет исследований впервые удалось осуществить полет робота насекомого. Так называемая пчела-робот может быть полезна для опыления технических культур, для поиска и оказания помощи при разведке и спасении при катастрофах, а также и в военных конфликтах.
При проекте принималось во внимание биология мух. Величиной около 10 мм, весом 80 мг робот подвешен на тонком питающем кабеле и снабжен маленьким микродвигателем. Крылья имеют размах 3 см и колеблются с частотой около 120 раз в секунду. Они приводятся в движение пьезоэлектрическим приводным элементом: керамическая полоска расширяется и сокращается, когда к ней прикладывается электрическое поле. Робот управляется системой управления. Каждое крыло колеблется независимо друг от друга.
При этом коллектив в настоящее время занят подключением микробатареи, чтобы робот больше не зависел от питающего кабеля. Кроме того они стремятся создать своего рода головной мозг. Он будет управлять движением пчелы-робота и будет способен распознавать наблюдаемые объекты, для того чтобы со временем робот мог находить цветы. Равно как этот робот в таком случае сможет устанавливать по требованию ближайшего научного сотрудника и сообщать ему о возможном месте нахождения пчелиных роев. В действительности практический микроробот может появиться не скоро, возможно, это вопрос не одного десятилетия.
DBJ № 7/13
Пер. с немецк. В. Ефимов

Естественное размножение семей самосмено…
окт 14, 2016
Племенные ресурсы среднерусских пчел Тат…
дек 15, 2016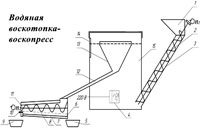
Водяная воскотопка-воскопресс…
март 19, 2020
Теплозащитные качества пчелиных сотов и …
март 27, 2023
Медоносы широколиственных лесов …
апр 1, 2021
Комплекс противороевых мер…
фев 21, 2023
Капсулирование тестообразных кормов для …
окт 24, 2017
Медонос донник белый
июнь 18, 2014
Биологические признаки приокских пчел…
дек 9, 2024
Чем заменить дымарь?
апр 29, 2022
Майкопский тип карпатских пчел — вчера, …
апр 11, 2023
Современное состояние апитерапии и ее пр…
окт 5, 2021
Упаковка для секционного меда…
апр 24, 2014
Любительский вывод маток…
нояб 29, 2014
Народные средства от туберкулеза…
дек 26, 2014








 Адрес редакции журнала "Пчеловодство":
Адрес редакции журнала "Пчеловодство":



